PID
PID 控制器的公式分为两种形式:理论上的连续形式和在计算机中实际应用的离散形式。
1. 连续形式 (理想公式)
这是 PID 控制器在控制理论中的标准数学表达式,它描述了一个连续变化的过程。
其中:
- :在时间
t时控制器的输出值(例如,电机的电压、加热器的功率)。 - :在时间
t时的误差。它是 设定点 (Setpoint, SP) 与 过程变量 (Process Variable, PV) 之间的差值,即 。 - :比例 (Proportional) 增益。它决定了控制器对当前误差的反应强度。误差越大,输出也越大。它主要影响响应速度。
- :积分 (Integral) 增益。它累积过去的所有误差。这个项的作用是消除系统稳定后仍然存在的微小静态误差(稳态误差)。
- :微分 (Derivative) 增益。它计算误差的变化速率,可以理解为对未来误差的预测。它的作用是抑制系统的振荡,减少超调,使系统更快稳定。
2. 离散形式 (代码实现)
在计算机程序中,我们无法进行连续的积分和微分,所以会使用离散的形式,通过在固定的时间间隔(Δt)进行计算来逼近连续行为。这也就是我们在 Python 代码中实现的形式。
其中:
- :在第
k个采样时刻的控制器输出。 - :在第
k个采样时刻的误差。 - :对过去所有误差的累加求和,用来近似积分项。
- :用当前误差与上一次误差的差值,来近似微分项(误差的变化率)。
- :每次计算之间的时间间隔,也就是我们的仿真步长。
PID仿真代码 示例代码:
import time
class PIDController:
"""一个封装好的 PID 控制器类 """
def __init__(self, Kp, Ki, Kd, setpoint=0):
self.Kp = Kp
self.Ki = Ki
self.Kd = Kd
self.setpoint = setpoint
self._integral = 0
self._previous_error = 0
def update(self, current_value, dt):
"""
根据当前值和时间步长(dt)计算 PID 输出。
:param current_value: 从系统中读取的当前测量值
:param dt: 仿真或控制循环的时间步长
:return: 控制器的输出值
"""
if dt <= 0:
return 0
# --- PID 计算核心 ---
error = self.setpoint - current_value
self._integral += error * dt
derivative = (error - self._previous_error) / dt
output = (self.Kp * error) + (self.Ki * self._integral) + (self.Kd * derivative)
# --- 更新状态以备下次调用 ---
self._previous_error = error
return output
def set_setpoint(self, new_setpoint):
self.setpoint = new_setpoint
self.reset()
def reset(self):
self._integral = 0
self._previous_error = 0
仿真与绘图函数
import time
import matplotlib.pyplot as plt
from PIDcontroller import PIDController
class SimulatedCar:
def __init__(self):
self.position = 0
self.velocity = 0
self.mass = 1.0
def update_state(self, force, dt):
acceleration = force / self.mass
self.velocity += acceleration * dt
self.position += self.velocity * dt
if __name__ == "__main__":
pid = PIDController(Kp=0.5, Ki=0.05, Kd=0.2)
target_position = 100.0
pid.set_setpoint(target_position)
car = SimulatedCar()
time_points = []
position_history = []
setpoint_history = []
output_history = []
simulation_duration_seconds = 100
simulation_step_interval = 0.1
print("--- 开始 PID 控制仿真 ---")
current_sim_time = 0
while current_sim_time < simulation_duration_seconds:
current_pos = car.position
# 使用固定的仿真步长调用 update 方法
control_force = pid.update(current_pos, simulation_step_interval)
car.update_state(control_force, simulation_step_interval)
time_points.append(current_sim_time)
position_history.append(car.position)
setpoint_history.append(target_position)
output_history.append(control_force)
current_sim_time += simulation_step_interval
print("--- 仿真结束 ---")
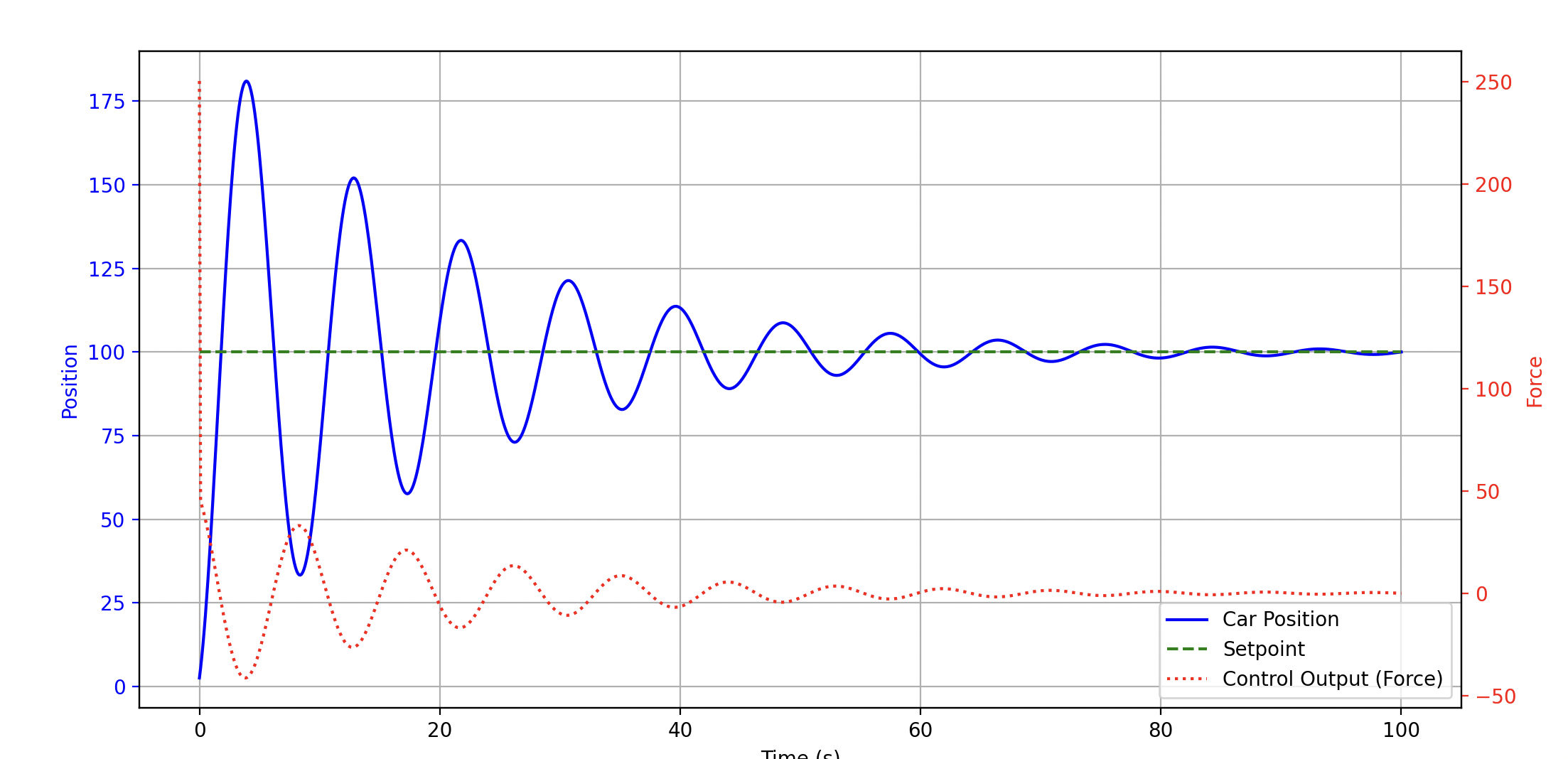
fig, ax1 = plt.subplots(figsize=(12, 6))
ax1.plot(time_points, position_history, 'b-', label='Car Position')
ax1.plot(time_points, setpoint_history, 'g--', label='Setpoint')
ax1.set_xlabel('Time (s)')
ax1.set_ylabel('Position', color='b')
ax1.tick_params('y', colors='b')
ax1.grid(True)
ax2 = ax1.twinx()
ax2.plot(time_points, output_history, 'r:', label='Control Output (Force)')
ax2.set_ylabel('Force', color='r')
ax2.tick_params('y', colors='r')
fig.suptitle('PID Controller Simulation (Corrected)')
lines, labels = ax1.get_legend_handles_labels()
lines2, labels2 = ax2.get_legend_handles_labels()
ax2.legend(lines + lines2, labels + labels2, loc='lower right')
plt.show()
仿真效果如下